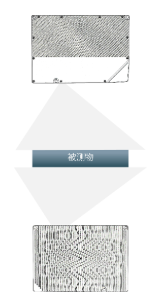
目前工业检测领域常见的检测技术,如线激光、双目结构光、移相法结构观光等等,大都运用了光的反射原理来获取物体的表面信息来实现工业领域的各类测量或检测,但无法直接测厚。本期我们将采用双相机上下对射的方法获取被测对象的厚度信息,实现不规则物品的厚度测量。
原理介绍
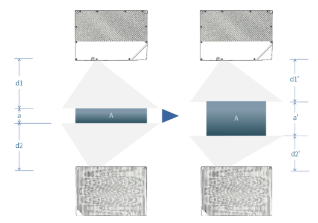
已知标准物体A的厚度为a,上下3D相机测得A的上下表面距离为d1,d2,当物体A厚度变为a'时,上下3D相机距离测量值为d1',d2'。则有:a'=a+(d1-d1')+(d2-d2')
以此为理论基础进行双头测厚。
双头测厚时有以下几个方面需要注意:
1.保证系统水平

FA镜头的FOV会根据焦距变化而变化,因此需要尽量保证上下3D相机的距离相等,即d1=d2,与此同时尽量保证整个系统的水平。
2.像素对齐

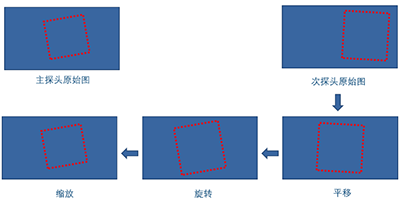
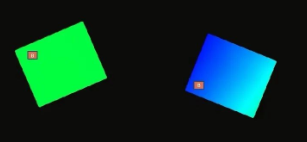
由于相机安装在被测物体上下两边,获得的图像产生了180°的翻转。在后期处理时需要将图像翻转,保证像素能够对齐。
像素对齐的实现
通过算法确认融合区域内的ROI后,将上下探头的其中一个传感器为主探头作为参照系,另外一个作为被融合对象为次探头。
3.温漂现象
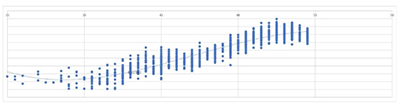
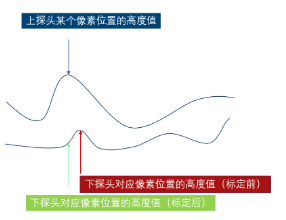
温漂现象在高精度工业测量中比较常见,在连续测量时测量值会随着3D相机温度的快速上升发生变化,一段时间后数据趋于稳定。上图所示为Sizector®3D相机某型号相机所测得温漂与测量值数据曲线图。
温漂解决方案:在确立好ROI之后,在区域内设置一个固定基准面B,并在每次测量时记录B面的高度变化,以此为标准解决温漂问题。
应用实现
①架设两台Sizector®3D相机,连接电脑。
②拍摄并获取图像
③标定ROI区域
④标定融合参数
⑤测得厚度

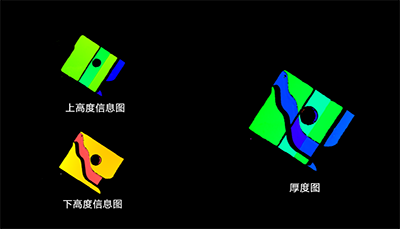
⑥输出上下点云及厚度数据
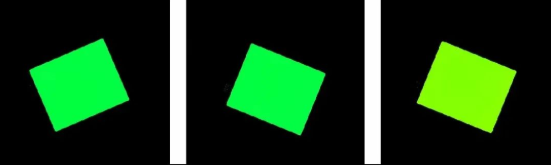
案例展示